








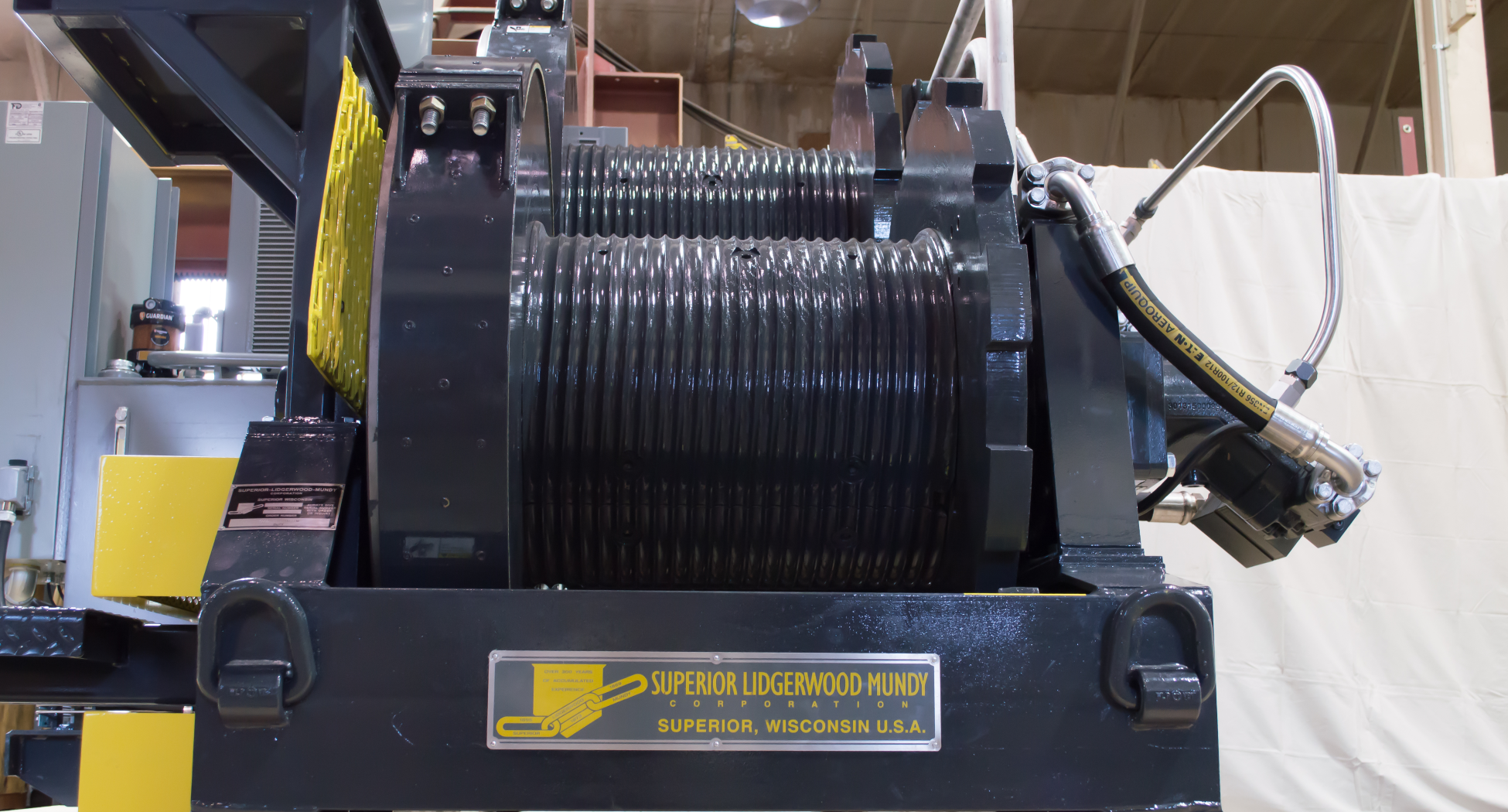
Custom winch and hoist systems are the forte of Superior Lidgerwood Mundy. By integrating innovative design, modern manufacturing methods, and comprehensive engineering, SLM provides safe, reliable, and cost effective winch and hoist solutions for any application.

Superior Lidgerwood Mundy is the leading barge haul system designer and equipment provider for the nation’s inland ports and terminals. Utilizing a procedural approach, SLM systems ensure unparalleled safety, efficiency, and automation.
SLM designs and builds hoist assemblies and components for tainter gates, leaf gates, sluice gates, intake gates, and all other hoist actuated water control gates. In addition to traditional gate hoist practices, we offer fully enclosed gearing drivetrains and wire rope conversions.

As an innovative partner with the USACE, SLM supplies bitts, winches, and infrastructure components for locks and dams spanning the country. Counter-torque tow haulage, rope-on-rope-off tow haulage, traveling and floating mooring bitts, we build the equipment necessary for safe and efficient lockage.
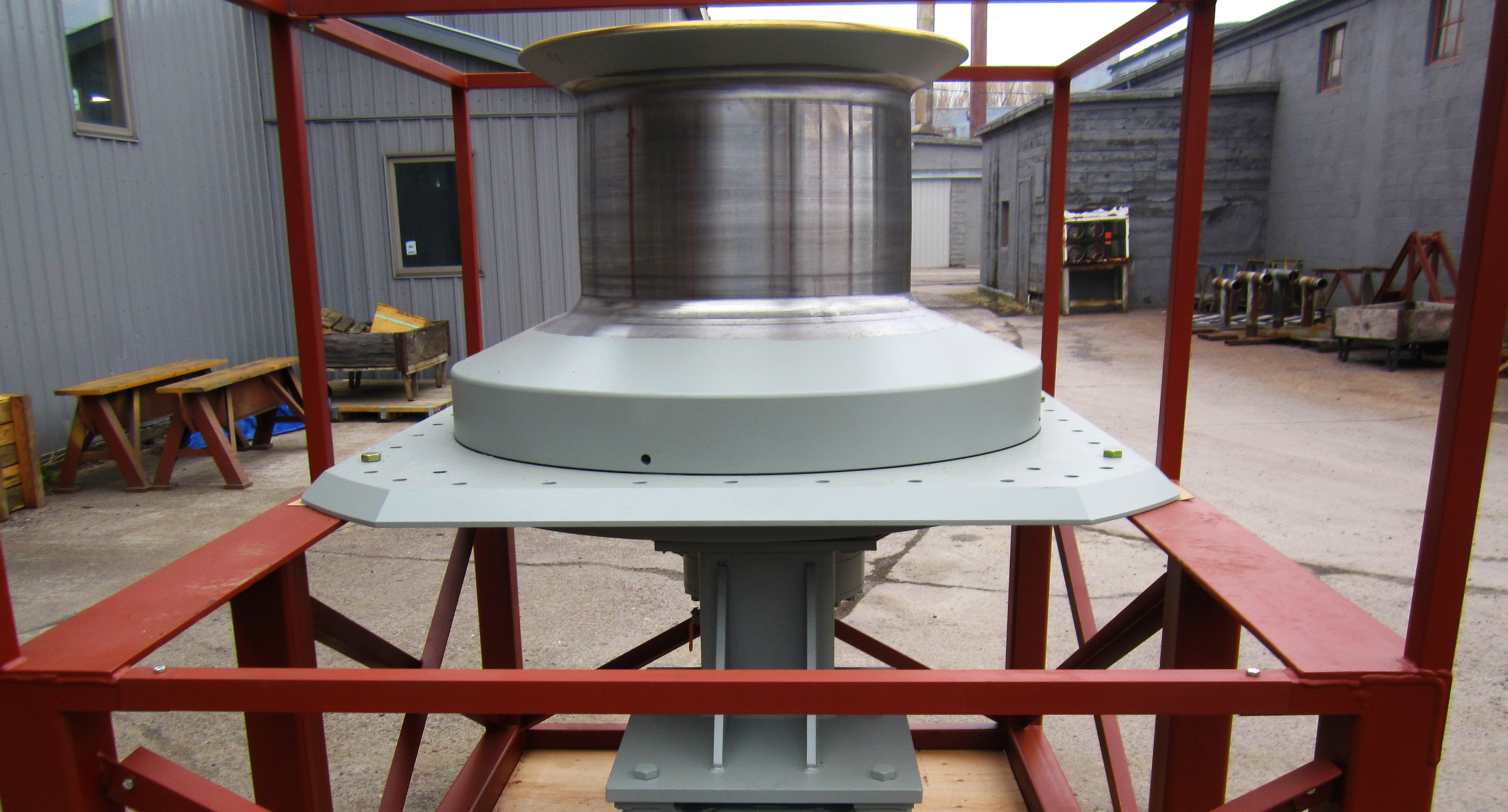
Superior Lidgerwood Mundy has proudly supplied capstans and deck machinery for nearly every government ship program since the 19th century. Each capstan and piece of deck machinery is backed by decades of proven performance and reliability.
From the Panama Canal to the Hoover Dam, Superior Lidgerwood Mundy has been a premier cable way equipment supplier for over a century. Equipment built for the demanding and remote locations of cableways requires a unique set of experience only SLM can provide.

Freight hoist systems, passenger transports, and funicular systems provided by SLM are designed and built to stand the test of time. This equipment is built specifically for the safe transport of people or heavy operational critical loads. We supply customers with systems their facilities can depend on for decades.

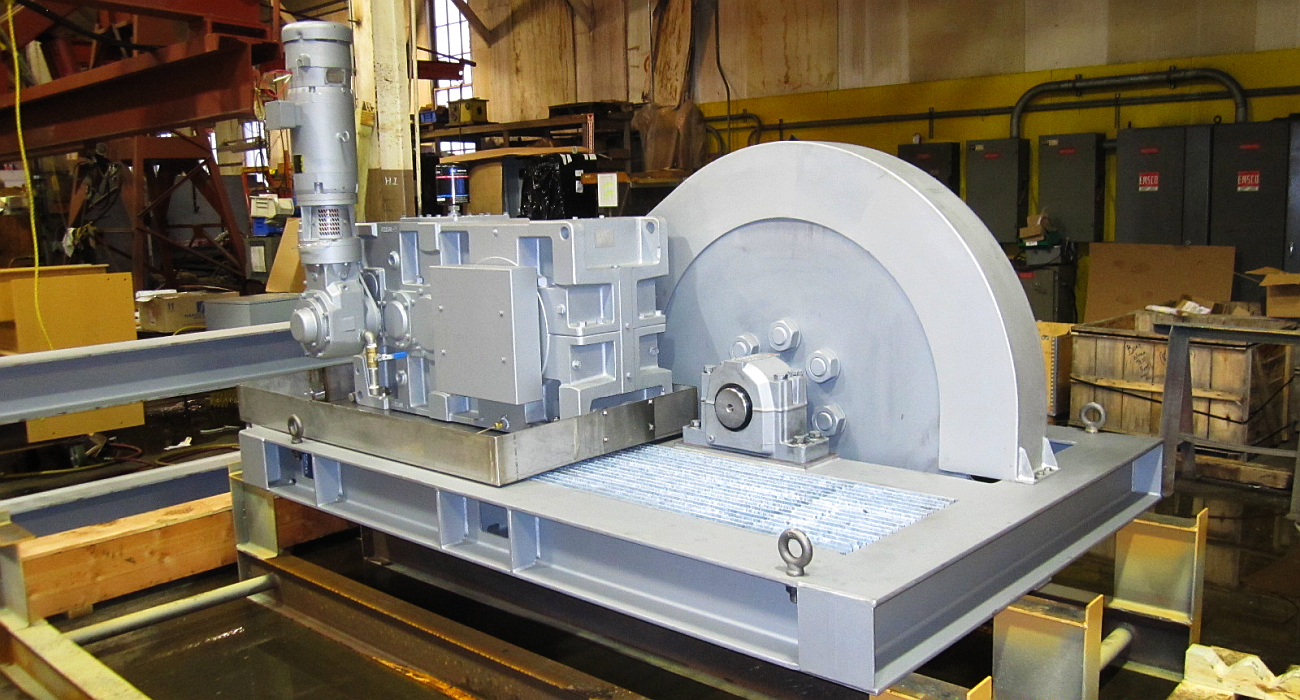
Superior Lidgerwood Mundy offers holistic solutions from inception to completion. We specialize in tackling complex challenges in winching and hoisting, offering unique hoists, custom controls, and large mechanical assemblies.
